 訂閱
訂閱 上一篇
上一篇 下一篇
下一篇想幫凱比改頭換面嗎?
作者: 塾長 日期: 2021-01-17 21:09


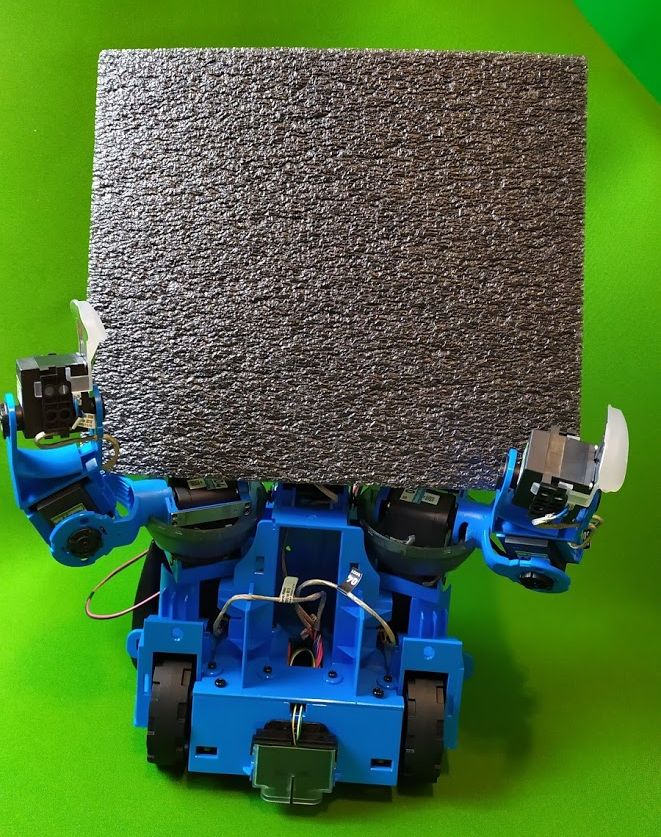
跨年開箱組裝凱比本體之後,了解其「外形、機構跟電控」的關聯,在開始思考「程式、通訊與AI」的同時,我想看到的是:若有自由彈性的機會,可以怎樣開放組合來控制機器人呢?
 |  |
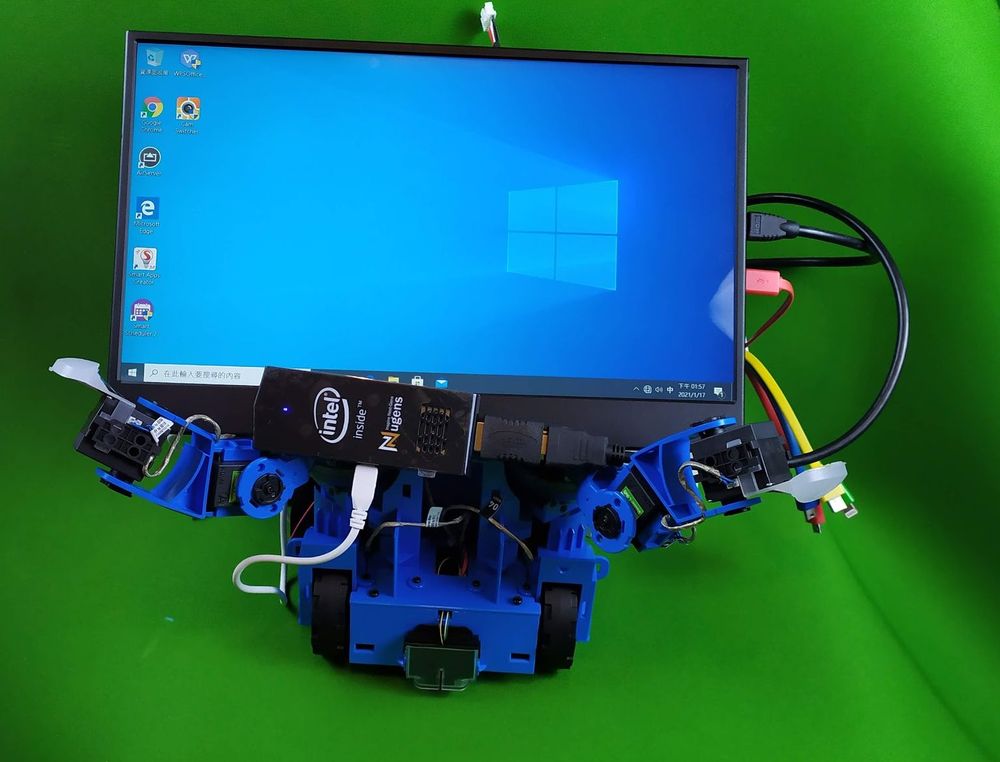
許願想望一番。我把自己手邊的盤點一番也方便思考,先畫了一張圖,還想持續整理出層級、規格與連接頭緒。我以常見的主機板、作業系統經驗來看,可能從Linux、Windows、IOS、Android、Chrome,若可以成為ROS(Robot Operating System) 或與其連接應用,預設應該沒問題。
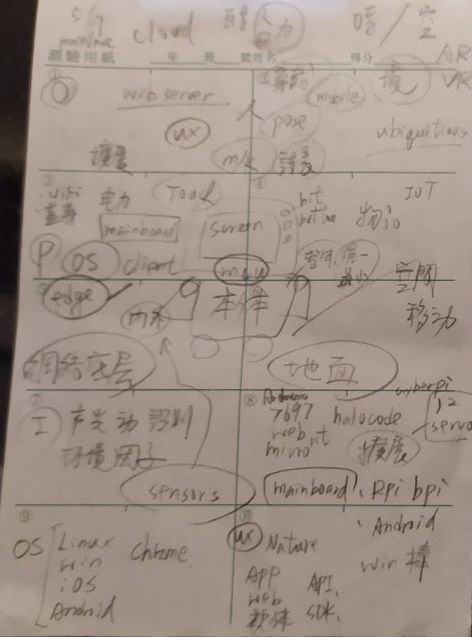 |  |  |
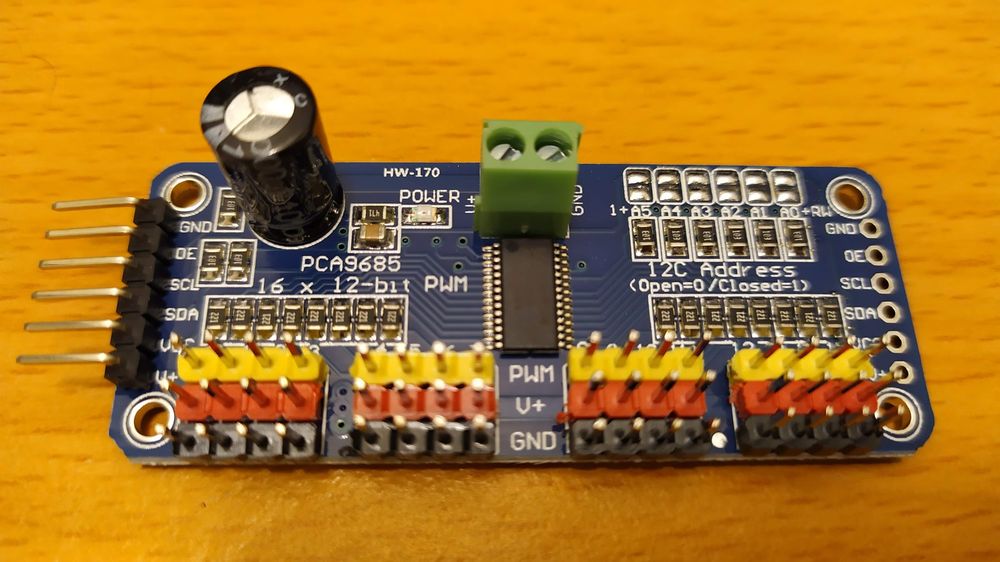
或者,利用一個或一組微控制器(MCU,Microcontroller Unit),依我印象中出現在學校教學應用的順序,例如Arduino、micro:bit 、Web:bit 、Halocode、Linkit 7697....等,結合擴展板與周邊感測器,可能在機器人身上,也與環境中的邊緣運算中心連結,利用無線網路跟藍芽進行通訊,還有些獨立可上網的鏡頭模組也可以整合運用。
PS:Halocode正好不在家,先印一張替代,另外還有NVIDIA 的Jetson nano我還沒玩(買)過。

 標籤:
標籤:
評論: 0 |
引用: 0 |
閱讀: 772


ePBL科技工具混搭百玩 (2024-02-05 16:30)
逛玩2024CES展裡的機器人服務公司 (2024-02-03 15:26)
ET趣味人戀舊博士論文研究 (2024-01-06 11:21)
Tripo AI~AI生成3D模型 (2024-01-06 08:11)
ILovePDF網站拆分PDF,發想Mergecube、Jigspace玩XR直播 (2023-10-23 15:56)
週一上午十點前,從大學塾、Notion到claude.ai,玩想台灣智慧教育與數位轉型 (2023-10-23 10:41)
初探www.eduaide.ai網站 (2023-10-16 09:47)
一樣的趣味人,探究玩台灣! (2023-09-17 19:54)
謀劃國家層級教育元宇宙初探~觀日本「XR、元宇宙企業展品與服務」開始 (2023-08-01 15:44)